can sdk
The Canis Labs CAN C SDK provides a uniform API for CAN that is portable to different CAN controller hardware, and to different microcontroller targets. The first CAN controller for this API is the Microchip MCP2517FD (and Microchip MCP2518FD). This is the CAN controller used on the Canis Labs CANPico board and a binding for that board is part of the SDK.
The Canis CAN SDK GitHub repository contains the source code for the API, CAN drivers and bindings to target microcontrollers.
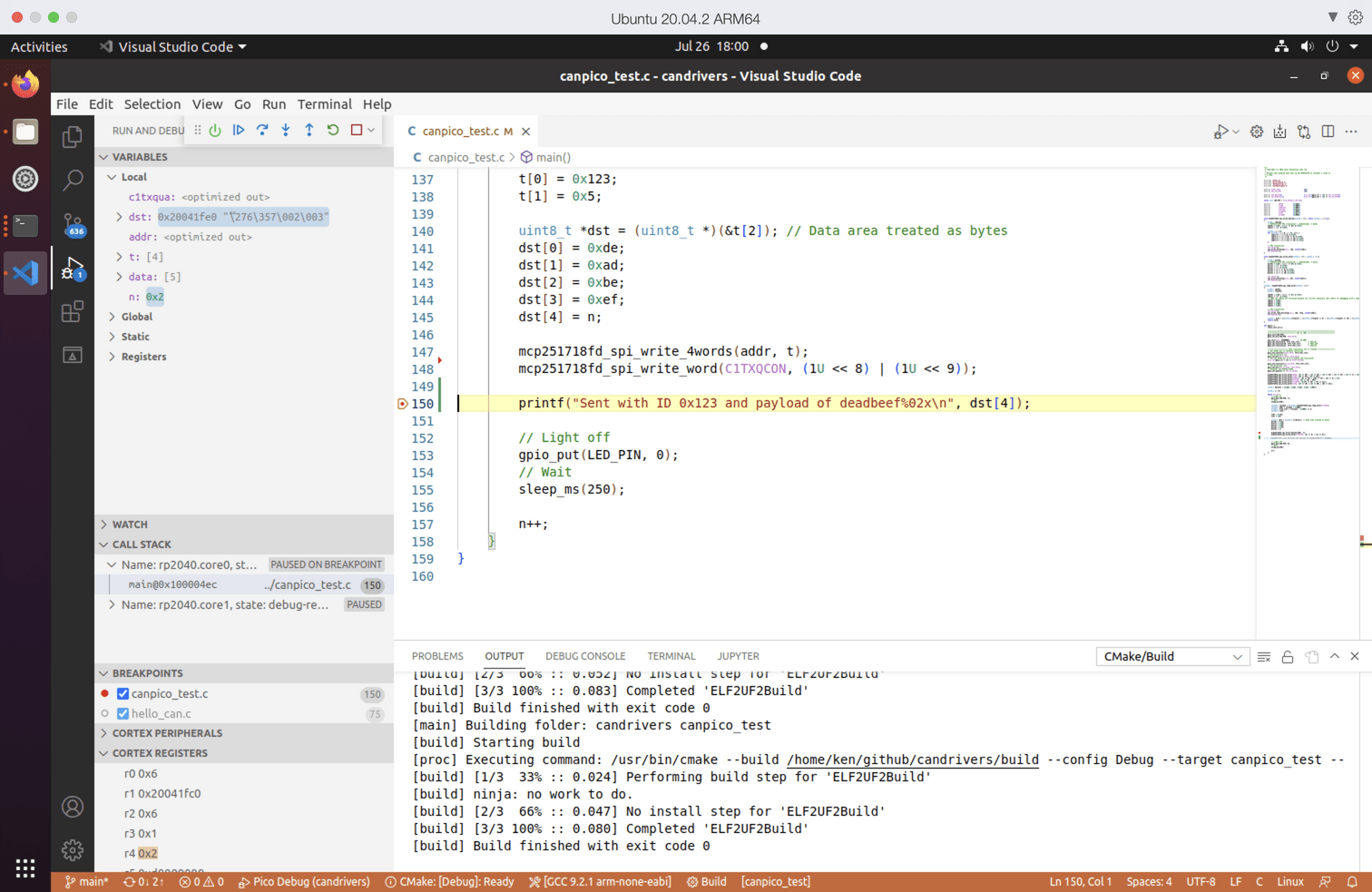
A CTO blog post on how to debug in C for the Raspberry Pi Pico using Microsoft Visual Studio Code as an embedded IDE and a Pico as hardware debug probe.
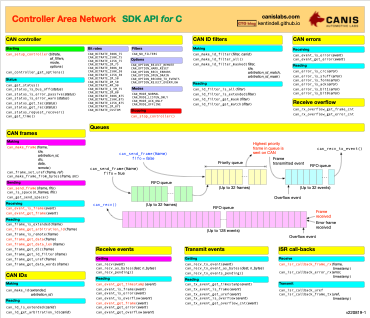
Cheatsheet for the CAN SDK API for C (PDF).
CAN SDK Reference Manual cover the API for C programmers to send and receive CAN frames and manage CAN error and frame transmit events (PDF).
Pre-built firmware of CAN SDK for C "Hello World" example for CANPico (hello_can.uf2).
